Twisted Soft Robots Navigate Mazes Without Human Or Computer Guidance

Researchers from North Carolina State University and the University of Pennsylvania have developed soft robots that are capable of navigating complex environments, such as mazes, without input from humans or computer software.
“These soft robots demonstrate a concept called ‘physical intelligence,’ meaning that structural design and smart materials are what allow the soft robot to navigate various situations, as opposed to computational intelligence,” says Jie Yin, corresponding author of a paper on the work and an associate professor of mechanical and aerospace engineering at NC State.
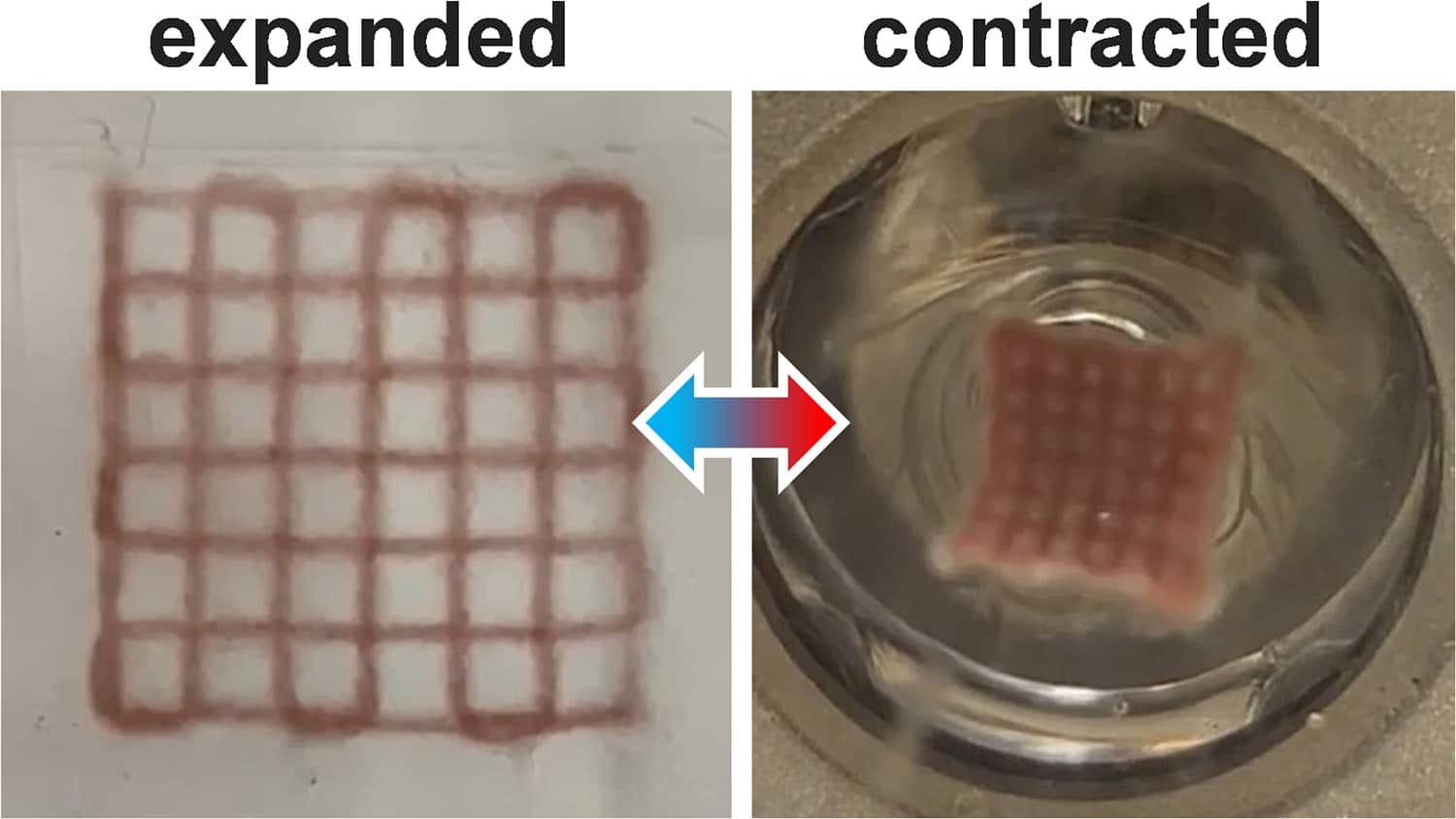
The soft robots are made of liquid crystal elastomers in the shape of a twisted ribbon, resembling translucent rotini. When you place the ribbon on a surface that is at least 55 degrees Celsius (131 degrees Fahrenheit), which is hotter than the ambient air, the portion of the ribbon touching the surface contracts, while the portion of the ribbon exposed to the air does not. This induces a rolling motion in the ribbon. And the warmer the surface, the faster it rolls. Video of the ribbon-like soft robots can be found at https://youtu.be/7q1f_JO5i60.
“This has been done before with smooth-sided rods, but that shape has a drawback – when it encounters an object, it simply spins in place,” says Yin. “The soft robot we’ve made in a twisted ribbon shape is capable of negotiating these obstacles with no human or computer intervention whatsoever.”
The ribbon robot does this in two ways. First, if one end of the ribbon encounters an object, the ribbon rotates slightly to get around the obstacle. Second, if the central part of the robot encounters an object, it “snaps.” The snap is a rapid release of stored deformation energy that causes the ribbon to jump slightly and reorient itself before landing. The ribbon may need to snap more than once before finding an orientation that allows is to negotiate the obstacle, but ultimately it always finds a clear path forward.
“In this sense, it’s much like the robotic vacuums that many people use in their homes,” Yin says. “Except the soft robot we’ve created draws energy from its environment and operates without any computer programming.”
“The two actions, rotating and snapping, that allow the robot to negotiate obstacles operate on a gradient,” says Yao Zhao, first author of the paper and a postdoctoral researcher at NC State. “The most powerful snap occurs if an object touches the center of the ribbon. But the ribbon will still snap if an object touches the ribbon away from the center, it’s just less powerful. And the further you are from the center, the less pronounced the snap, until you reach the last fifth of the ribbon’s length, which does not produce a snap at all.”
The researchers conducted multiple experiments demonstrating that the ribbon-like soft robot is capable of navigating a variety of maze-like environments. The researchers also demonstrated that the soft robots would work well in desert environments, showing they were capable of climbing and descending slopes of loose sand.
“This is interesting, and fun to look at, but more importantly it provides new insights into how we can design soft robots that are capable of harvesting heat energy from natural environments and autonomously negotiating complex, unstructured settings such as roads and harsh deserts.” Yin says.
The paper, “Twisting for Soft Intelligent Autonomous Robot in Unstructured Environments,” will be published the week of May 23 in the Proceedings of the National Academy of Sciences. The paper was co-authored by NC State Ph.D. students Yinding Chi, Yaoye Hong and Yanbin Li; as well as Shu Yang, the Joseph Bordogna Professor of Materials Science and Engineering at the University of Pennsylvania.
The work was done with support from the National Science Foundation, under grants CMMI-2010717, CMMI-2005374 and DMR-1410253.
Jie Yin is comfortable conducting interviews in both English and Mandarin.
-shipman-
Note to Editors: The study abstract follows.
“Twisting for Soft Intelligent Autonomous Robot in Unstructured Environments”
Authors: Yao Zhao, Yinding Chi, Yaoye Hong, Yanbin Li and Jie Yin, North Carolina State University; Shu Yang, University of Pennsylvania
Published: May 23, Proceedings of the National Academy of Sciences
DOI: 10.1073/pnas.2200265119
Abstract: Soft robots that can harvest energy from environmental resources for autonomous locomotion is highly desired; however, few are capable of adaptive navigation without human interventions. Here, we report twisting soft robots with embodied physical intelligence for adaptive, intelligent autonomous locomotion in various unstructured environments, without on-board or external controls and human interventions. The soft robots are constructed of twisted thermal-responsive liquid crystal elastomer ribbons with a straight centerline. They can harvest thermal energy from environments to roll on outdoor hard surfaces and challenging granular substrates without slip, including ascending loose sandy slopes, crossing sand ripples, escaping from burying sand, and crossing rocks with additional camouflaging features. The twisting body provides anchoring functionality by burrowing into loose sand. When encountering obstacles, they can either self-turn or self-snap for obstacle negotiation and avoidance. Theoretical models and finite element simulation reveal that such physical intelligence is achieved by spontaneously snapping-through its soft body upon active and adaptive soft body-obstacle interactions. Utilizing this strategy, they can intelligently escape from confined spaces and maze-like obstacle courses without any human intervention. This work presents a de novo design of embodied physical intelligence by harnessing the twisting geometry and snap-through instability for adaptive soft robot-environment interactions.
This post was originally published in NC State News.